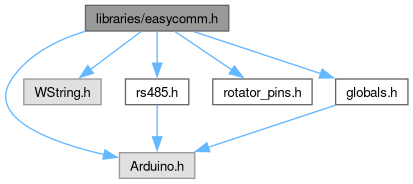
#include <Arduino.h>#include <WString.h>#include "rs485.h"#include "rotator_pins.h"#include "globals.h"
Include dependency graph for easycomm.h:
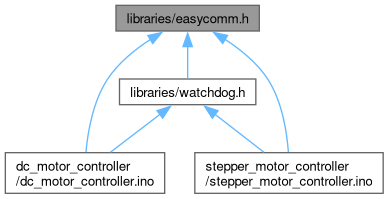
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | easycomm |
| Class that functions for easycomm 3 implementation. More... | |
Macros | |
| #define | RS485_TX_TIME 9 |
| Delay "t"ms to write in serial for RS485 implementation. | |
| #define | BUFFER_SIZE 256 |
| Set the size of serial buffer. | |
| #define | BAUDRATE 19200 |
| Set the Baudrate of easycomm 3 protocol. | |
Functions | |
| rs485 | rs485 (RS485_DIR, RS485_TX_TIME) |
Detailed Description
It is a driver for easycomm 3 protocol as referred, in Hamlib.
Licensed under the GPLv3
Definition in file easycomm.h.
Macro Definition Documentation
◆ BAUDRATE
| #define BAUDRATE 19200 |
Set the Baudrate of easycomm 3 protocol.
Definition at line 24 of file easycomm.h.
Referenced by easycomm::easycomm_init().
◆ BUFFER_SIZE
| #define BUFFER_SIZE 256 |
Set the size of serial buffer.
Definition at line 23 of file easycomm.h.
Referenced by easycomm::easycomm_proc().
◆ RS485_TX_TIME
| #define RS485_TX_TIME 9 |
Delay "t"ms to write in serial for RS485 implementation.
Definition at line 22 of file easycomm.h.
Function Documentation
◆ rs485()
| rs485 rs485 | ( | RS485_DIR | , |
| RS485_TX_TIME | ) |
Generated by